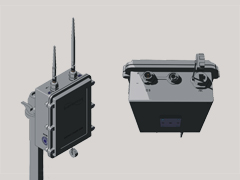
АСУ полетом «Турман-АС» представляет собой программно-аппаратный комплекс наземного и бортового (авионика) оборудования для обеспечения автоматического полета БЛА.
С самого зарождения проекта основная идея комплекса – применить накопленный авиационными специалистами опыт в области систем управления, динамики полета, навигации, электроники и автоматики для создания авионики БЛА.
Известно, что характеристики самолета существенно зависят от характеристик бортового оборудования. Без качественного решения задачи стабилизации движения и наведения БЛА в заданную точку или линию маршрута с точностью, ограниченной только навигационной системой, невозможно качественно решить любую функциональную задачу комплекса с БЛА.
Алгоритмы управления автопилота «Турман-АС» являются развитием и адаптацией для БЛА алгоритмов, применяемых в пилотируемой авиации.
Ключевыми особенностями АСУ полетом являются:
- выполнение полета в автоматическом и полуавтоматическом режиме;
- моделирование полета по заданному маршруту при подготовке полетного задания;
- алгоритмы САУ настроены под конкретный тип носителя, обеспечивая требуемые запасы устойчивости;
- реконфигурация алгоритмов САУ в зависимости от этапа полета;
- ограничение предельно-допустимых значений параметров движения;
- траекторное управление по линии заданного пути;
- единый цифровой канал связи между БЛА и наземной станцией связи;
- диагностика отказов и система аварийного прерывания полета;
- оценка метеоусловий в полете и адаптация к ним управления.
При разработке комплекса АСУ полетом применяются следующие методы и принципы:
- модельно-ориентированный подход к проектированию систем управления;
- модульный принцип создания авионики;
- модульный принцип создания программного комплекса;
- открытая архитектура, широкий набор интерфейсов UART, USB, I²C, SPI, Ethernet;
- вычислительный модуль под управлением ОС на основе ядра Linux;
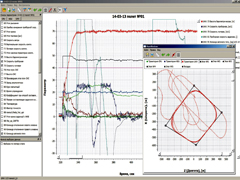
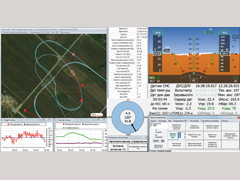
- регистрация более 150 параметров полета в летном эксперименте, средства обработки полетной информации.
В результате применения выбранных методов и накопленного опыта команды разработчиков возможны:
- создание системы управления БЛА в соответствии с заданными требованиями;
- сокращение программы летных испытаний;
- отладка и настройка системы в лаборатории на моделях, что повышает безопасность летного эксперимента;
- развитие комплекса АСУ полетом, модернизация с обновлением электронных компонент;
- адаптация системы управления для БЛА любого класса;
- выполнение исследовательских работ в области систем управления, навигации, функционального применения.
| Диапазон угловых скоростей |
±300º/с |
Погрешность измерения высоты |
2 м |
| Диапазон ускорений |
±16 g |
Диапазон температур |
— 40º … + 60º |
| Диапазон измерения угла крена |
±180º |
Ток потребления |
менее 0.5 А |
| Диапазон измерения угла тангажа |
±90º |
Напряжение питания |
5 В |
| Погрешность определения углов ориентации |
0.3º |
Масса |
менее 60 г |
| Погрешность определения путевого угла |
0.3º |
Мощность передатчика |
100 мВт |
| Погрешность определения координат |
3 м |
Интерфейсы |
UART, USB, I²C, SPI, Ethernet |
| Погрешность определения скоростей |
0.1 м/с |
Операционная система |
Embedded Linux |